一组研究人员公布了一项创新技术,利用磁性微型旋转机器人同时进行超精密表面抛光和清洁。这些微型机器人具有纳米级的污染物去除和抛光能力,为半导体和光学等行业提供了一种轻量级、可扩展且成本效益的替代产品。
该团队的研究成果发表在《小结构》杂志上,强调了磁性软机器人在精密制造领域的革命潜力。研究团队由韩国科学技术院(KAIST)教授金三河和汉阳大学教授Jeong Jae (JJ) Wie领导。
在高密度半导体生产中,实现金属层的超低表面粗糙度对器件性能至关重要。即使是微小的缺陷也会导致电子元件效率和可靠性的降低。
此外,在制造过程中确保表面没有污染物对于避免引入可能损害设备功能的颗粒至关重要。为了满足这些严格要求,超精密抛光和清洁技术已成为半导体制造的关键组成部分。
传统方法,如化学-机械研磨(CMP)和后CMP清洗系统,已成为表面研磨和去除污染物的行业标准。然而,这些系统存在明显缺点。CMP设备不仅庞大复杂,而且极其昂贵,难以扩展或升级。
此外,在这些过程中使用的消耗品,如抛光垫、磨料浆和清洁刷,价格昂贵,需要经常更换,从而增加了运营费用。高昂的前期成本和持续的维护需求对旨在降低生产成本同时提高产量的制造商构成了重大挑战。
为了解决这些挑战,研究团队开发了“旋转机器人”,这是一种由外部磁场驱动的微型机器人,可以进行超精密的表面抛光和清洁。这种自旋机器人由热塑性聚氨酯- fe3o4纳米复合材料制成,由磁性搅拌器控制,产生旋转磁场。
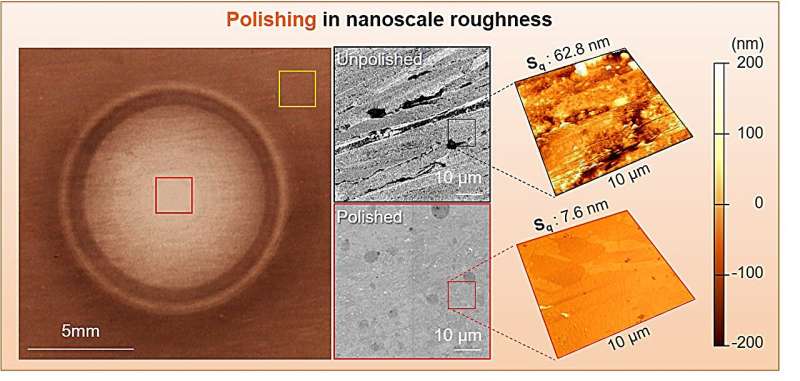
这种装置虽然比传统设备小得多,也简单得多,但却能使自旋机器人在表面上自主旋转和旋转,在去除纳米级污染物时达到99.6%的显著清洁效率。除了清洁能力之外,这些机器人还可以将表面抛光到惊人的光洁度,达到平均粗糙度(Ra) 1.8 nm的粗糙度水平。
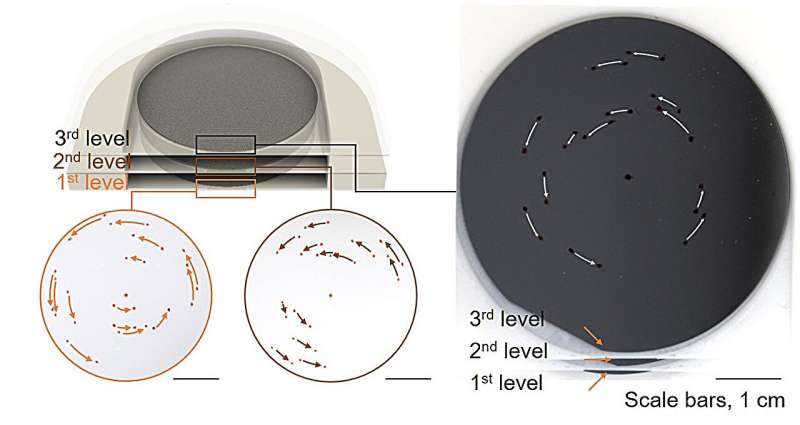
这项技术真正具有开创性的是它能够同时操作多个旋转机器人。多达42个自旋机器人在三个垂直堆叠的晶圆上一起工作,为表面工程提供了前所未有的可扩展性和效率。尽管它的规模很小,旋转机器人系统比传统的抛光工具轻1000倍,但却提供了相当甚至更好的结果。
此外,该旋转机器人能够进行三体研磨抛光。在这个过程中,在自旋机器人和被抛光表面之间捕获硬硅颗粒,逐渐以纳米级精度去除材料。这种方法可以产生镜面般光滑的光洁度,与离子束抛光和磁流变抛光等最先进的技术相媲美,但成本和设备尺寸都只是其中的一小部分。
旋转机器人技术的关键优势之一是其可持续性。传统的抛光和清洁方法需要大量的能量,并且经常使用危险的化学物质。相比之下,旋转机器人是由磁场驱动的,不需要这些化学物质,也减少了对环境的影响。此外,机器人是可重复使用的,进一步提高了技术的可持续性。
本文来自作者[svs]投稿,不代表立场,如若转载,请注明出处:http://asiaamour.com/post/6086.html
评论列表(4条)
我是的签约作者“svs”!
希望本篇文章《磁性微纺丝机器人实现超精细表面抛光和清洁》能对你有所帮助!
本站[]内容主要涵盖:国足,欧洲杯,世界杯,篮球,欧冠,亚冠,英超,足球,综合体育
本文概览: 一组研究人员公布了一项创新技术,利用磁性微型旋转机器人同时进行超精密表面抛光和清洁。这些微型机器人具有纳米级的污染物去除和抛光能力,...